Gesture Controlled Robot Using Accelerometer Project Report Journals
Pdf Development Of Gesture Controlled Robot Using 3 Axis Accelerometer
Pdf Gesture Controlled Mobile Robotic Arm Using Accelerometer
Pdf Design And Implementation Of Gesture Controlled Robotic Arm For Industrial Applications
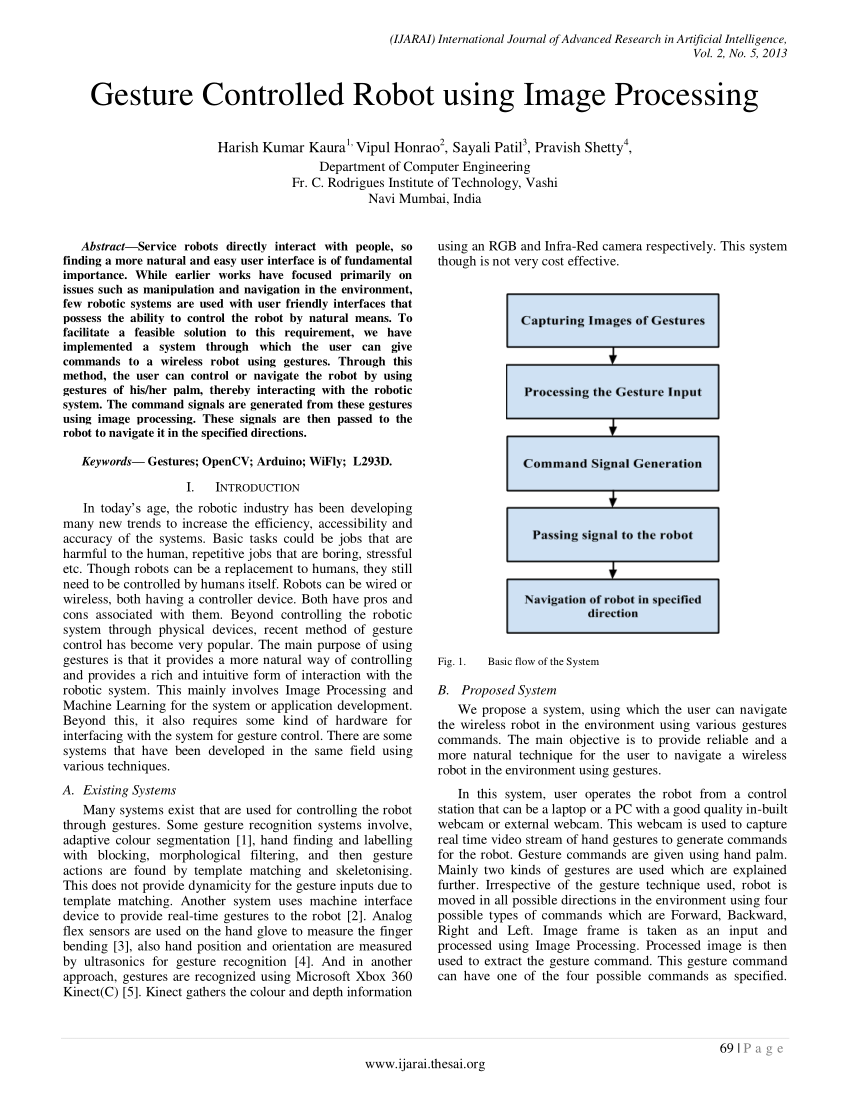
Pdf Gesture Controlled Robot Using Image Processing

Pdf Design And Implementation Of A Wireless Gesture Controlled Robotic Arm With Vision
Pdf R3arm Gesture Controlled Robotic Arm For Remote Rescue Operation
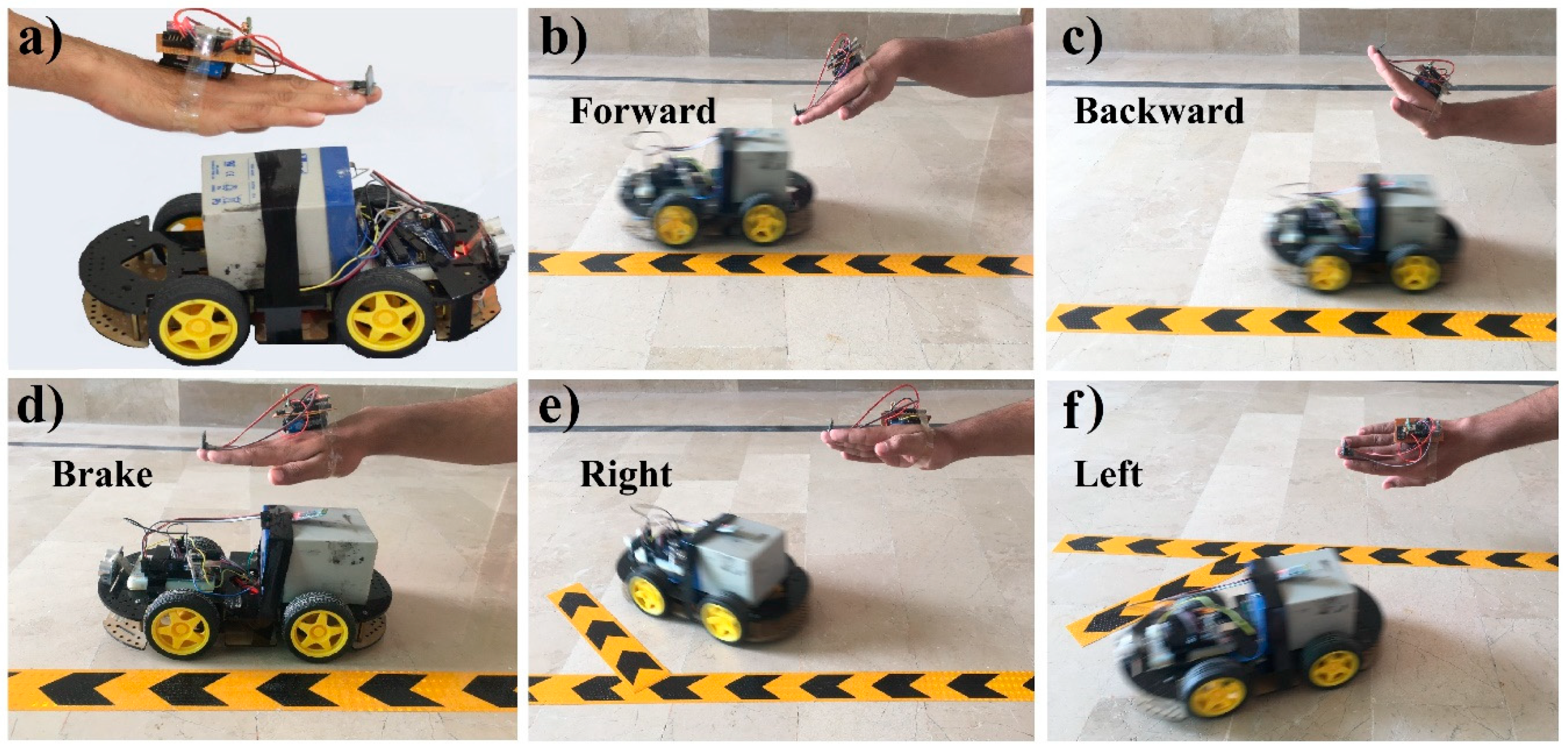
In this wireless gesture controlled robot project we are going to control a robot using hand gestures.
Gesture controlled robot using accelerometer project report journals. 4 gesture controlled robot using mems accelerometer for eradication of weeds indian journal of science and technology vol 8 5 460 465. An accelerometer is used to detect the tilting position of your hand and a microcontroller gets different analogue values and generates command signals to control. Hello guys this is our 5th project thats called gesture control robot using accelerometer arduino based. To understand the working of this arduino gesture control car let us divide this project into two parts.
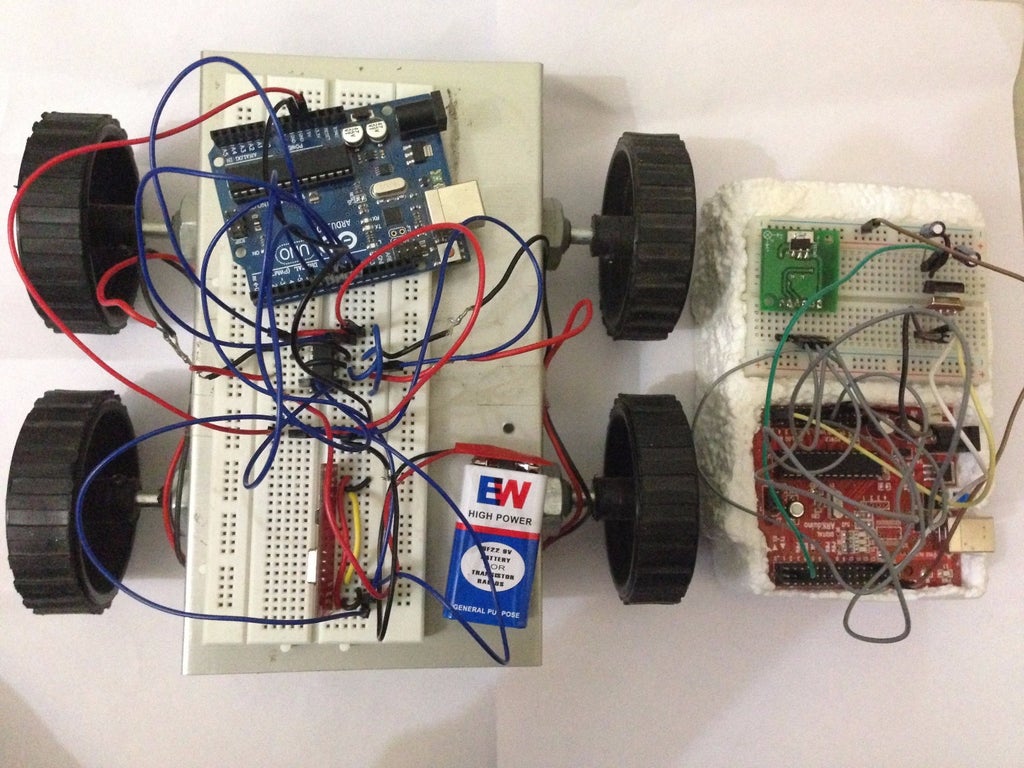
Working of hand gesture controlled robot using arduino. Wireless gesture control rbot. In this project we have used hand motion to drive the robot. Gesture controlled robot using arduino 2018 9 ambalika institute of management of technology college code 363 3 1 block diagram our gesture controlled robot works on the principle of accelerometer which records hand movements and sends that data to the comparator which assigns proper voltage levels to the recorded movements.
This is an easy user friendly way to interact with robotic systems and robots. One is transmitter part and another is receiver part. The paper presents the robot which is controlled by a human gesture using accelerometer. 3 gesture controlled robot using arduino and android chanda et al international journal of advanced research in computer science and software engineering 6 6 june 2016 pp.
An analysis available at traffic police gesture recognition using accelerometer human machine interaction hmi. The working of the sensor is based on the concept of acceleration due to gravity at. After making some basic robots like line follower robot computer controlled robot etc we have developed this accelerometer based gesture controlled robot by using arduino uno. A survey a design of real time control robot system.
The first part is the transmitter part remote in which the mpu6050 accelerometer sensor continuously sends signals to the receiver robot through arduino and nrf transmitter. It portrays how to control a robot using hand gesture control technique with a 3 axis accelerometer sensor. Robots are playing an important role in automation across all the sectors like construction military medical manufacturing etc.

Pdf Development Of Gesture Controlled Robot Using Flex Sensor And Accelerometer Roshan Gabhane And V H Somkuwar Gmail Com Somkuwar Academia Edu
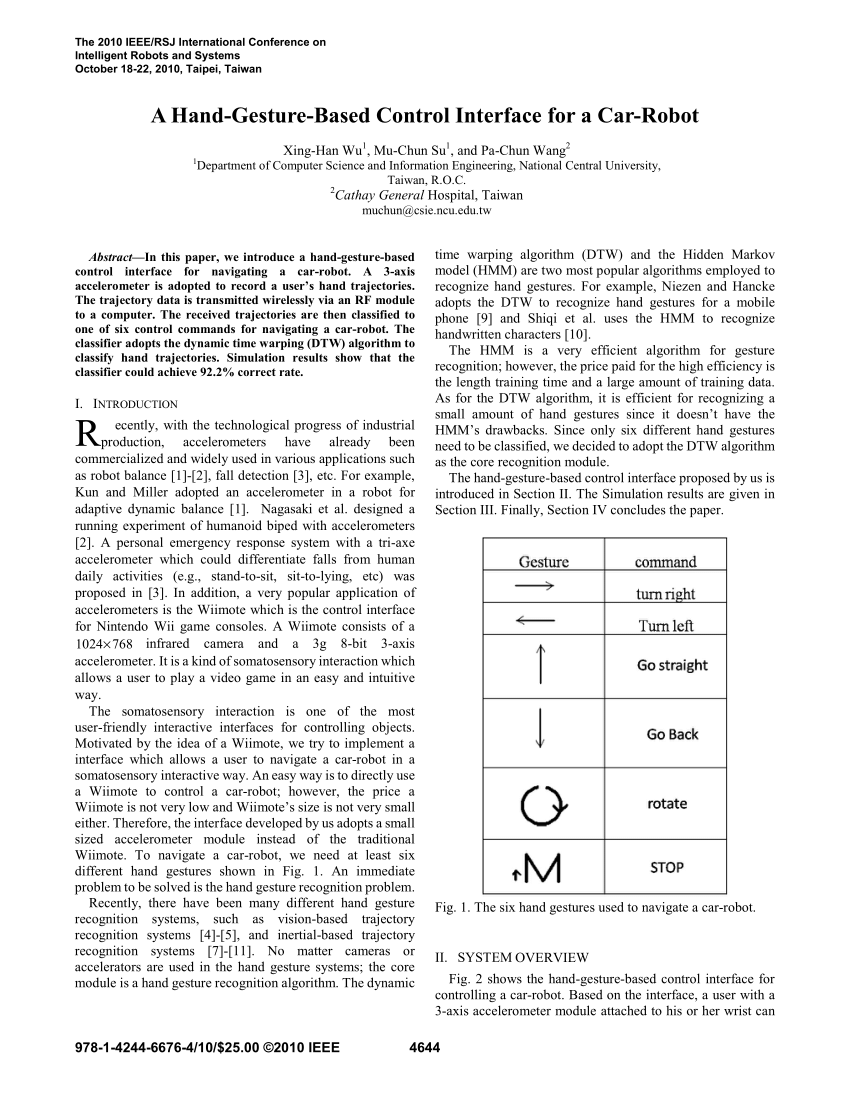
Pdf A Hand Gesture Based Control Interface For A Car Robot
Http Www Ijsdr Org Papers Ijsdr1805055 Pdf

Project File Of Gesture Controlled Robot Operational Amplifier Transmitter
Http Www Ijetsr Com Images Short Pdf 1520496606 155 161 Ieteh128 Ijetsr Pdf
Gesture Controlled Robot Using Arduino 7 Steps Instructables

Pdf Designing And Implementation Of A Low Cost Wireless Gesture Controlled Robot For Disable People
Pdf Virtual Telepresence And Gesture Controlled Robot
Http Www Academicscience Co In Admin Resources Project Paper F201510201445323321 Pdf
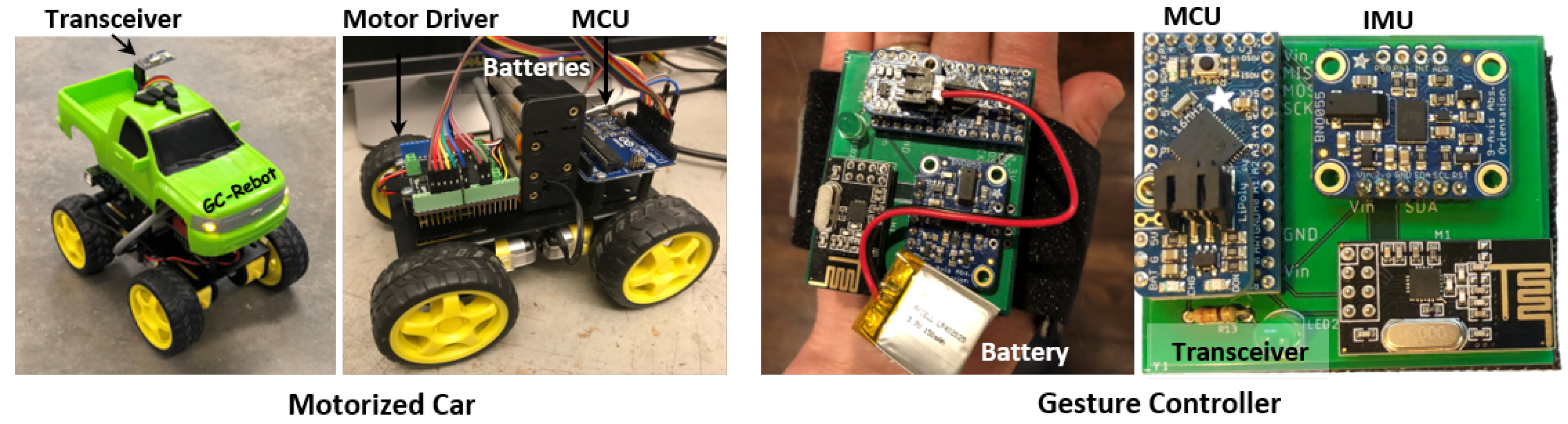
Pdf Design And Implementation Of Arduino Based Gesture Controlled System With Accelerometer

Pdf Gesture Controlled Robot Using Arduino And Android

Pdf Gesture Recognition And Control Part 1 Basics Literature Review Different Techniques International Journal Ijritcc Academia Edu
Sensors Free Full Text A Gesture Controlled Rehabilitation Robot To Improve Engagement And Quantify Movement Performance Html
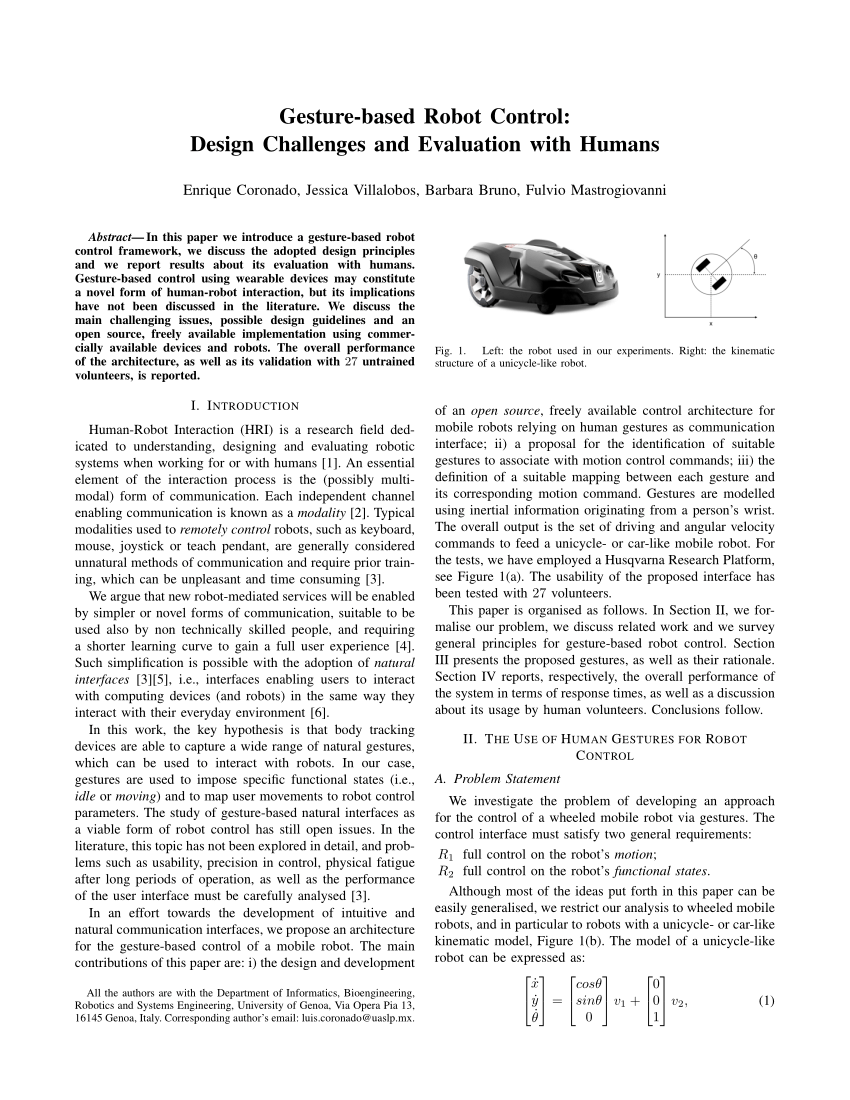
Pdf Gesture Based Robot Control Design Challenges And Evaluation With Humans
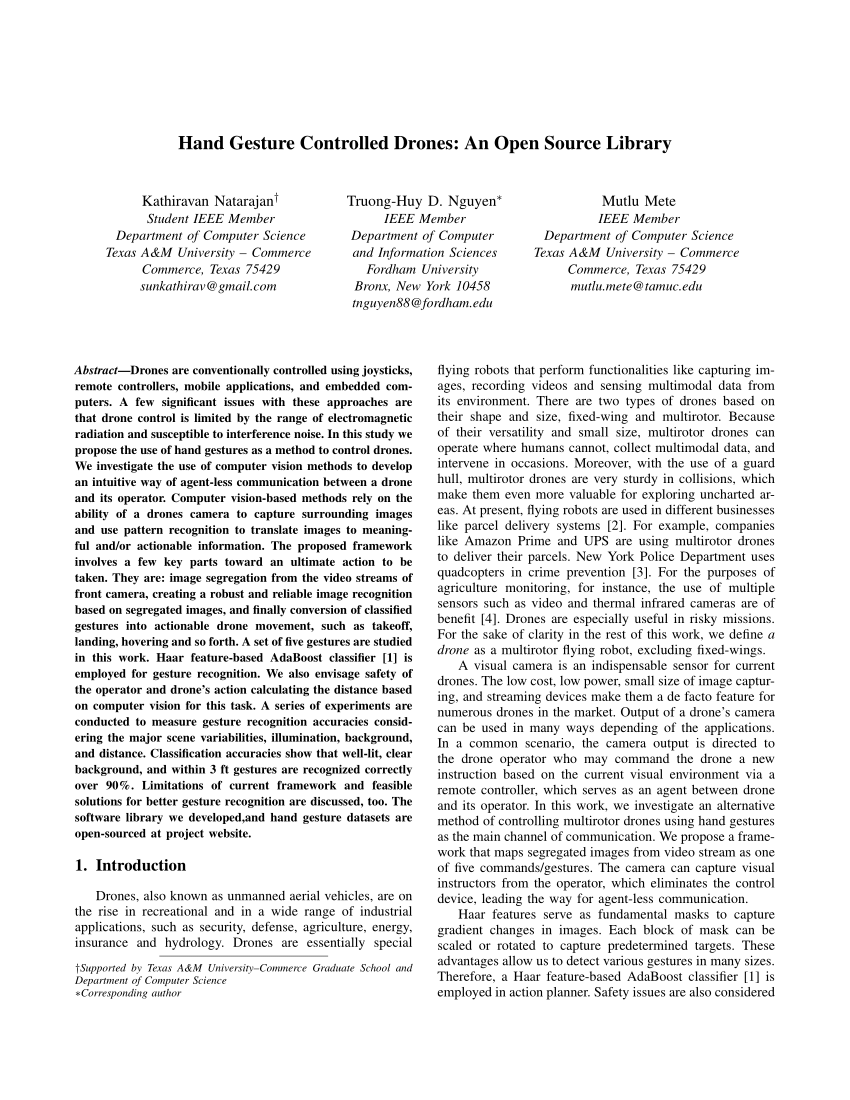
Pdf Hand Gesture Controlled Drones An Open Source Library
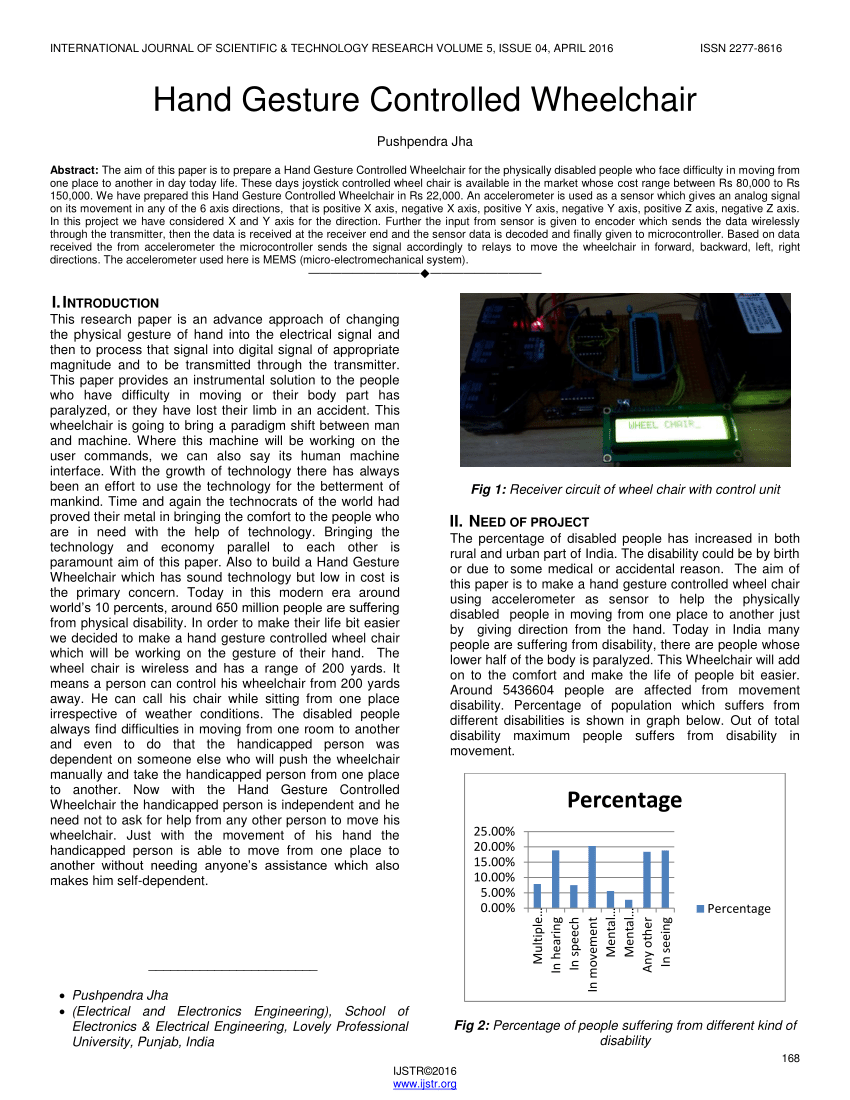
Pdf Hand Gesture Controlled Wheelchair

Pdf Hand Motion Controlled Robotic Arm Based On Micro Electro Mechanical System Sensors Gyroscope Accelerometer And Magnetometer
Gesture Controlled Robot Arduino Project Hub

Making A Gesture Controlled Robot Using Your Smartphone Arduino Project Hub
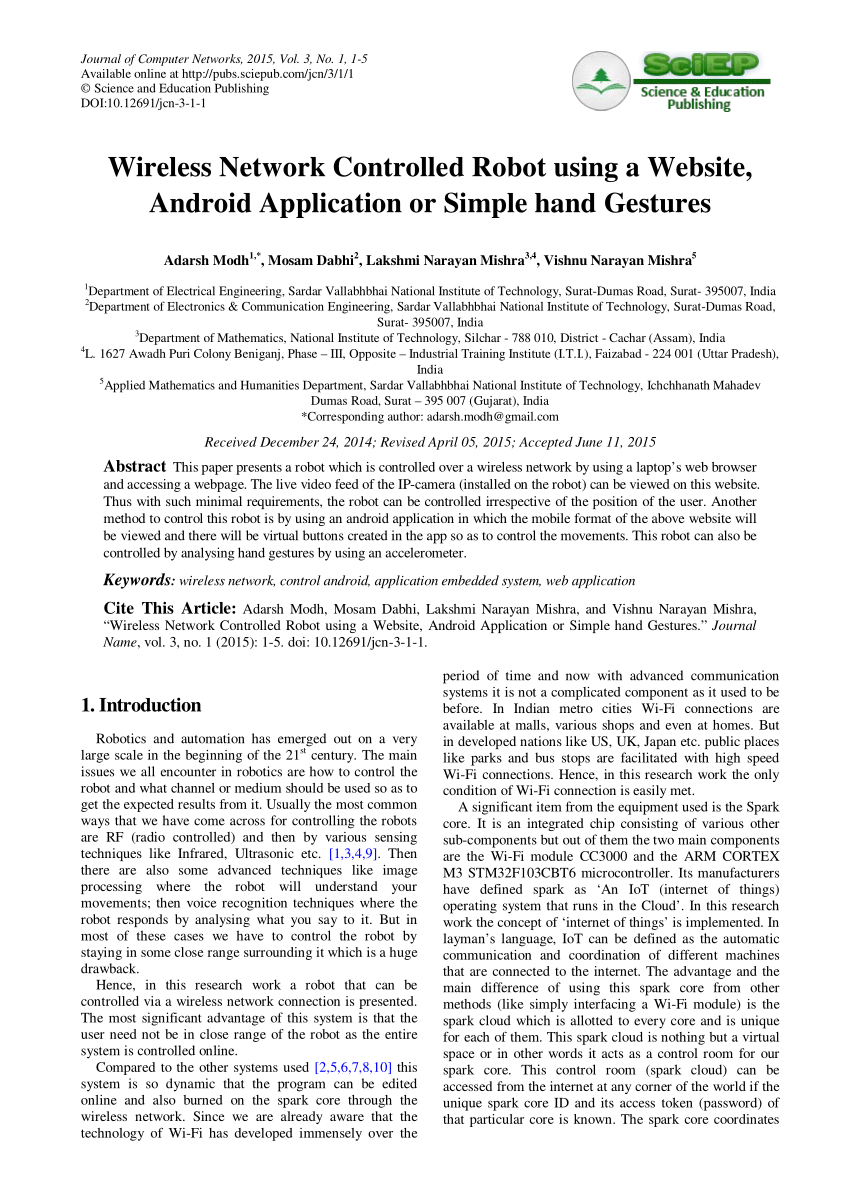
Pdf Wireless Network Controlled Robot Using A Website Android Application Or Simple Hand Gestures
Hand Gesture Controlled Robot Arduino Project Hub

Hand Gesture Controlled Robot Using Arduino In 2020 Arduino Robot Control

Mm 2128 Circuit Design Of Android Controlled Robot Car Download Diagram

Gesture Controlled Robot Using Arduino And Bluetooth 6 Steps Instructables

Block Diagram Of Transmitter Accelerometers Led Power Supply Block Diagram
Hand Gesture Controlled Wheel Chair

Pdf Gesture Control Robotic Arm Using Flex Sensor
Https Www Ijitee Org Wp Content Uploads Papers V9i2 B7185129219 Pdf

Hand Gesture Based Wireless Controlled Robot
Hand Gesture Controlled Robot
Hand Gesture Controlled Wireless Robot

Gesture Control Car Using Mpu6050 And Arduino 7 Steps With Pictures Instructables
Https Www Ijarmate Com Index Php Option Com Login Task Download Volume Doc Fname V4i5 Foldertype Journal Id 935

Design And Implementation Of A Wireless Gesture Controlled Robotic Arm With Vision Semantic Scholar

Rc Bot Labsi

Pdf Gesture Control Robot

How To Make A Gesture Control Robot At Home Youtube Real Steel Humanoid Robot Robot
161 Bluetooth Projects Arduino Project Hub

Making A Gesture Controlled Robot Using Arduino Control Glove Without Flex Sensor Using Hall Effect Sensor And Acceleromet Hall Effect Sensor Accelerometers
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcr8sj7upfyzfzammlmhtir4qz2arywyabmaia Usqp Cau
Http Ijsetr Org Wp Content Uploads 2015 08 Ijsetr Vol 4 Issue 8 2838 2841 Pdf
Sensors Free Full Text Single Equipment With Multiple Application For An Automated Robot Car Control System Html
Https Www Ijeat Org Wp Content Uploads Papers V8i6s F10500886s19 Pdf

